


免费技术咨询: 13763334031
自从20世纪60年代初,人类创造了第一台工业机器人以后,工业机器人就显示出它极大的生命力,在短短40多年的时间中,工业机器人技术得到了迅速的发展,工业机器人已在工业发达国家的生产中得到了广泛的应用。

目前,工业机器人已广泛应用于汽车及汽车零部件制造业、机械加工行业、电子电气行业、橡胶及塑料工业、食品工业、木材与家具制造业等领域中。在工业生产中,焊接机器人、装配机器人、喷涂机器人及搬运机器人等工业机器人都已被大量采用。
公司机器人越来越多,担心机器人出问题?怎样才能有备
免费技术咨询: 13763334031
无患?怎样将解决方法化繁为简?下面教大家一些小诀窍以及常见的故障分析。

当机器人在工作过程中发生故障不要慌张,如果故障不是由于控制器引起的,那么故障的原因肯定是机器部件发生损坏。为了尽快以最简便的方法处理故障、应当对故障进行分析。并且需要找出是哪个零件引起了故障。请按下面步骤进行简单检查和维护:

第1步:那一个轴出现了问题?
首先、检查是哪一个轴引起了故障。如果很难检测出故障、核对是否有下列可能出现的机器异常。
①是否有零件发出噪音?
②是否有零件过热?
③是否有零件松动或有后坐力?
第2步:哪个零件损坏了?
如果检测出了不正常的轴、检查哪一部分引起了问题。同一种现象会有很多种可能的原因。
注意:
1) 过载——当负载超过额定电机负载时现象出现。具体来说就是触发了线圈保护器的热继电器。
2) 操作时有噪音——现象是在操作过程中出现振动。
3) 停止时摇摆——现象是当机器人停止时发生摆动。
4) 无规律的颤抖——现象是当机器人没有动作时有零星的颤抖。

第3步:查出故障的零件之后、根据“主要零部件故障诊断和解决”执行相关的修理步骤。
主要零部件故障诊断和解决
工业机器人主要零部件包含减速齿轮、制动装置、电机、编码器等,在零部件故障中又以减速齿轮为故障多发,制动装置、电机和编码器次之。
当减速齿轮损坏时会发生振动或发出不正常的声响。这种情况下,它会引起过载和不正常的偏离扰乱正常的操作。有时还会引起过热。机器人可能会完全不能移动或可能出现位置偏移错误。引起这些原因可能是因减速齿轮主轴(S、H、V)或腕轴(R2 、B 、R1)损坏引起的。如何诊断到底是主轴还是腕轴损坏?
需要进行几步细致的诊断:
(1) 当机器人工作时,检查减速齿轮是否有震动、不正常声响或过热现象。
(2) 检查减速齿轮是否有松动和磨损。将S轴的刹车释放开关扳至【开】的位置、按照前后的方向摆动第一个机械臂然后用手检查是否有不正常。
(3) 核查在不正常现象发生前外围设备是否已与机器人连接。(减速齿轮的损坏可能是由连接造成的。)
(4) 前后摇晃末端执行器(如焊枪和手型装置等等)检查减速齿轮是否松动。
(5) 关闭电机、同时开启刹车释放开关、核查是否可以用手转动轴。如果不能就说明了减速齿轮境况不佳。
(6) 核查在不正常现象发生前外围设备是否已与机器人连接。(减速齿轮的损坏可能是由连接造成的)

按照此步骤诊断之后能够确定到底是主轴还是腕轴损坏,当确定损坏位置之后,针对其进行相对应的解决方案。如主轴需更换减速齿轮,需要起重机来提升和悬吊机器人机械臂。而腕轴除了更换减速齿轮之外,还可以更换整个机械腕部分,在更换整机机械腕部分是一个迅捷而可靠的解决方案,因为更换减速齿需要时间和一些必要的设备,如有困难请咨询我们的售后人员。
相对于减速齿轮的更换,制动装置和电机的更换就简单了许多,值得注意的是在诊断和更换制动装置时,需要注意安全。当关闭电机时,通过开启、关闭刹车释放开关检查操作中是否能听到刹车声。如果听不到说明刹车线破损。在进行刹车释放开关的开启、关闭操作时、小心机械臂脱落。刹车释放开关位于控制器箱门的控制板上,检查出有损坏和老化及时更换新部件。

以
Q1:机器人如何做好周期维修保养?
A:1、定期保养机器人可以延长机器人的使用寿命,保养周期可以分为日常三个月,六个月,一年,三年。具体内容如下:

Q2:什么情况下要做备份?
A:1、新机器第一次上电后。
2、在做任何修改之前。
3、在完成修改之后。
4、如果机器人重要,定期1周一次。
5、最好在U盘也做备份。
6、太旧的备份定期删除,腾出硬盘空间。
Q3:如何开始机器人的安装调试?

Q4:如何正确使用摇杆?
A:摇杆就象汽车油门一样,幅度大则机器人动作快。所以一开始要小幅度的控制摇杆使机器人运动。如果在增量模式下,则机器人动作为步进形式与幅度无关。
Q5:什么是三个重要的程序数据?
A:三个重要的程序数据是工具数据tooldata, 工件坐标数据wobjdata, 有效载荷loaddata。不正确设定会影响机器人伺服电机寿命和节拍时间。
Q6:机器人进入了急停状态怎么办?
A:当机器人进入了急停,一般请按以下的操作:急停开关复位----示教器中报警确认复位--按一下控制柜上的白色按钮。
Q7:机器人开机进入了系统故障状态怎么办?
A:1、重新启动一次机器人。
2、如果不行,在示教器查看是否有更详细的报警提示,并进行处理。
3、重启。
4、如果还不能解除则尝试B 启动。
5、如果还不行,请尝试P 启动。
6、如果还不行请尝试I 启动(这将机器人回到出厂设置状态,小心)
Q8:什么是机器人机械原点?机械原点在哪里?
A:机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。
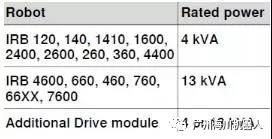
Q9:机器人的接入电源线的规格是怎么样的呢?
A:请看以下的图示:
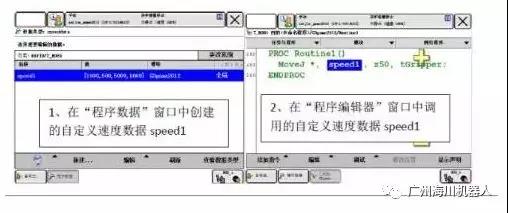
Q10:如何在RAPID 程序里自定义机器人轨迹运动的速度?
A:1、在示教器主菜单中选择程序数据。
2 、找到数据类型Speeddata 后,点击新建。
3 、点击初始值,Speeddata 四个变量含义分别为:v_tcp 表示机器人线性运行速度v_rot 表示
获取优惠报价:13763334031
机器人旋转运行速度,v_leax 表示外加轴线性运行速度,v_reax 表示外加轴旋转运行速度,如果没有外加轴则后两个不用修改。
4、自定义好的数据就可在RAPID 程序中进行调用了。
End
▣ 声明:本文素材系网络收集,编辑整理。文中所用视频、图片、文字版权归原作者所有。无法确认真正原始作者,故仅标明转载来源。如涉及作品版权问题,烦请及时联系13763334031(微信同号)协调删除!
▣ 建议:文中所述难免存在缺失或错漏之处,烦请大家在留言区畅所欲言、发表评论,您知道的或许正是大家想了解的!这样我们可以帮助更多的人了解更多!谢谢您的支持!
咨询电话:020-87832519
手机:13763334031
邮箱:2368534649@qq.com
地址:省市从化区温泉镇温泉大道413号
